Designed for ISRO Robotics Challenge 2025. Visual-Inertial Odometry (VIO) based drone for extraterrestrial terrain mapping. Custom 3D-printed TPU landing gear for slopes up to 15°. Jetson Nano + Pixhawk 4 with ArduPilot/PX4 for GPS-denied 6-DoF pose estimation. Validated hover stability (0.24m drift) and autonomous landing.
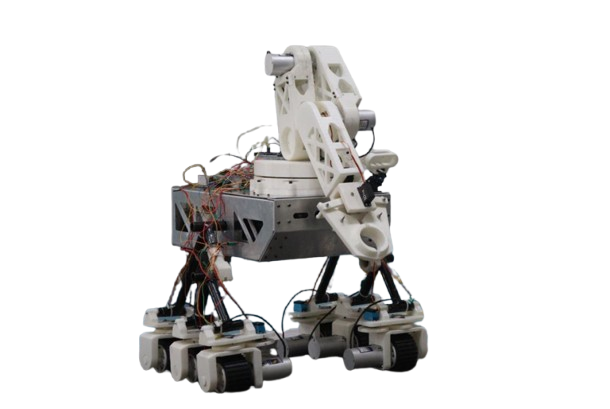
ISRO Robotics Challenge 2024. Built from scratch with CNC-cut chassis and custom PCBs (EasyEDA). ATmega2560 for low-level control, Jetson Nano for ROS2 autonomy. Visual-Inertial Odometry using Intel RealSense D435i. OMPL-based path planning with PID control. 4-DOF 3D-printed manipulator with inverse kinematics and collision-free motion planning.
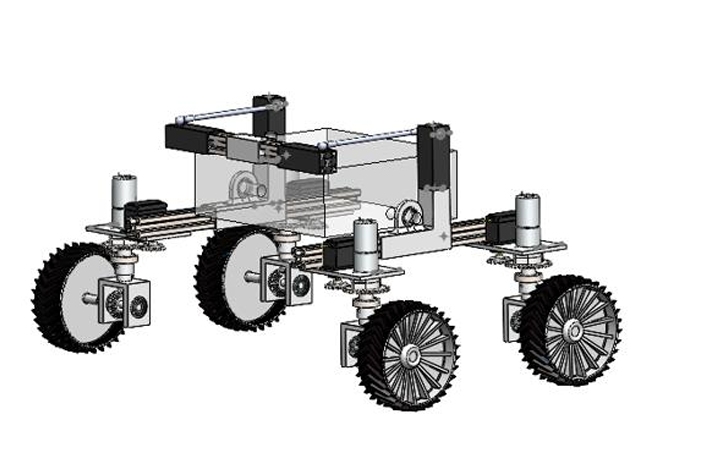
Personal project featuring swerve drive modules with zero-radius turns and omnidirectional motion. Differential-linked rocker suspension for passive terrain adaptability. Modular CAD in SolidWorks with bevel gear mechanism. Digital twin in ROS2 with URDF, tested in Gazebo with joint velocity/position controllers. Derived holonomic kinematics from first principles.
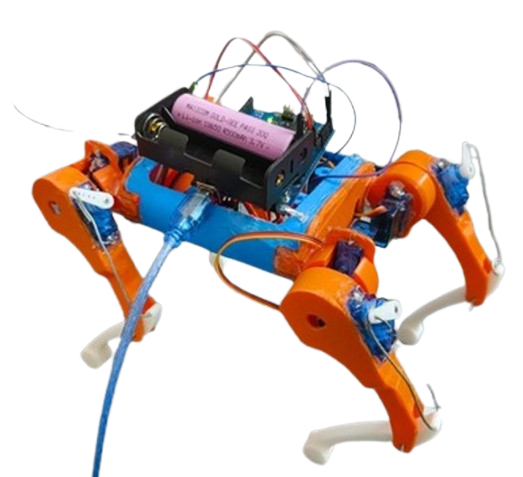
8-DOF quadruped legged robot designed in SolidWorks and 3D-printed. Derived inverse kinematics for gait generation with compliant leg mechanism. Raspberry Pi for real-time gait path planning and video streaming to base station. ROS2 for node execution and simulation testing before physical deployment.
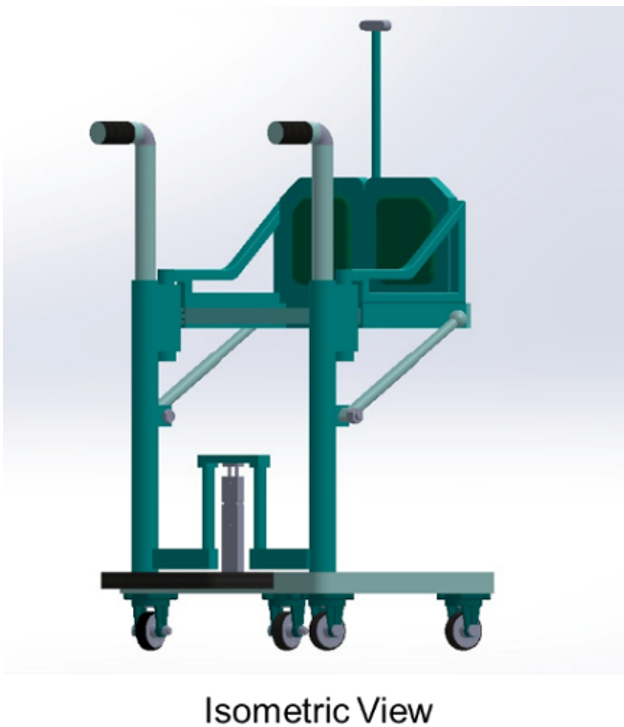
2nd Place in Hackathon in Science & Engineering. Autonomous indoor mobility system for elderly and specially-abled individuals. 2D LiDAR + IMU-based SLAM for real-time mapping and path planning. Motorized flap-style lifting seat for assisted transfers. Obstacle perception and safe maneuvering in confined spaces. Designed for future IoT smart home integration.
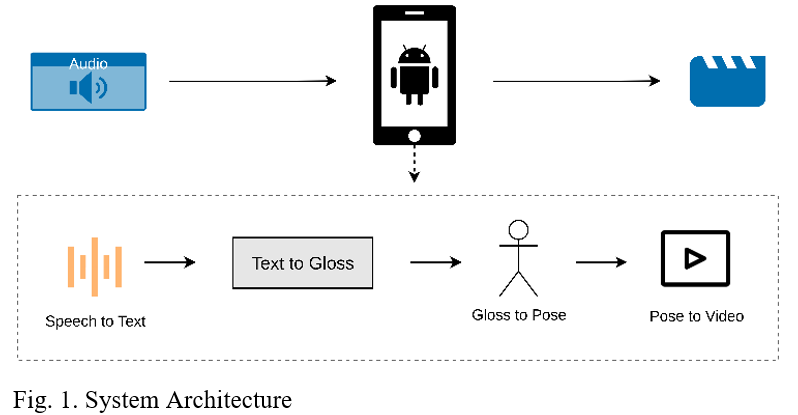
CSRC Funded Project 2025. End-to-end AI pipeline: Speech-to-Text (AI4Bharat Tamil ASR via NVIDIA NeMo) → Text-to-Gloss (Tamil NLP with Stanza) → Gloss-to-Pose (VQ-VAE + Transformer). 87 keypoints for body/hand/face pose generation. Overcame codebook collapse using orthogonal regularization and EMA updates. Real-time sign animation for accessibility.
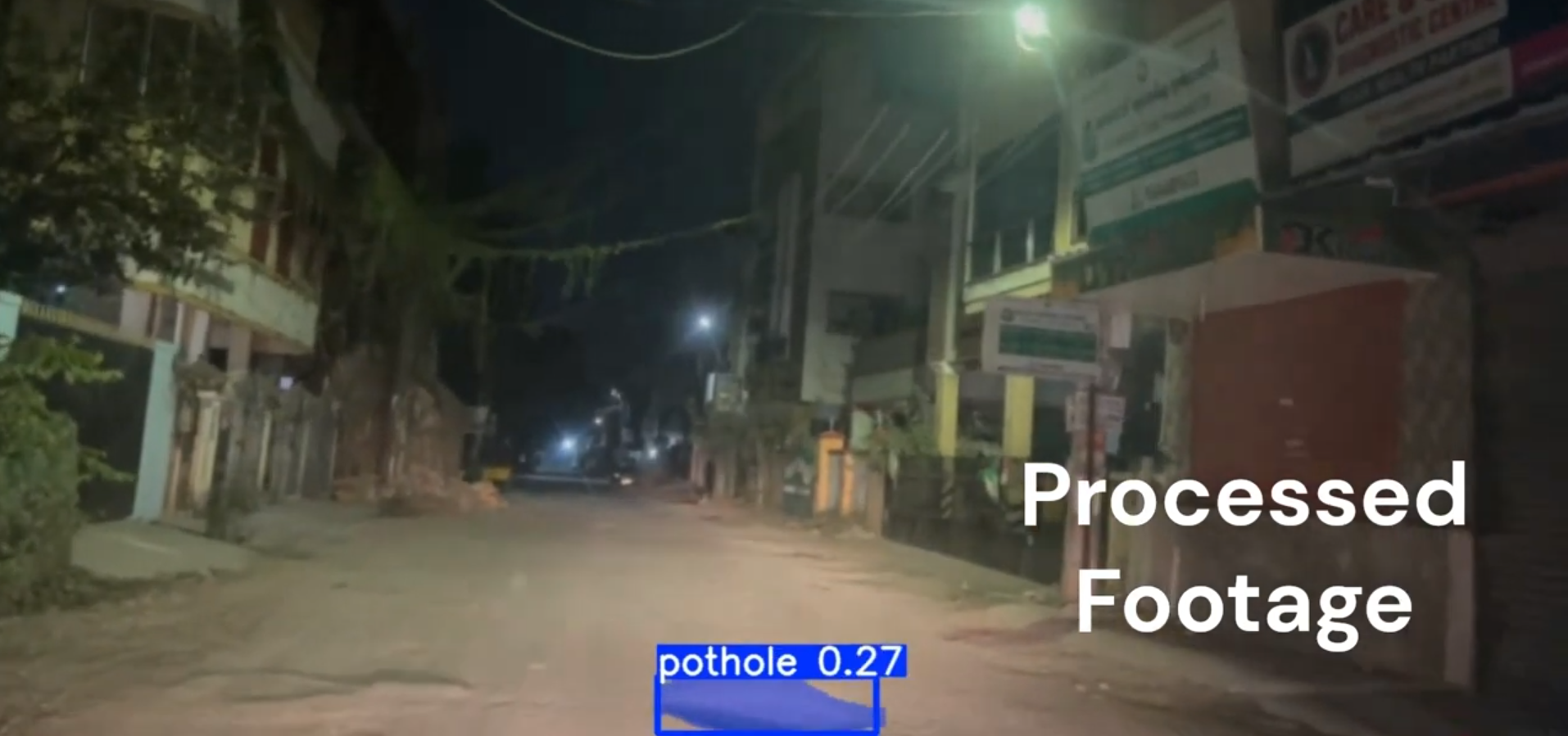
EYIC 2024 (IIT-Bombay) Funded Project. YOLO-based pothole detection with custom night-time dataset achieving 86% accuracy. GPS integration for priority-based road maintenance analytics. Real-time detection pipeline for municipal road monitoring and infrastructure management.
KAL-M Robotics internship project. Real-time autonomous navigation integrating visual odometry, neural networks, LiDAR, and depth camera on NVIDIA Jetson Nano. Reduced robot-workstation communication latency by 90% (165ms → 15ms). Custom PCB design for sensor integration and power management. SLAM for mapping and localization in dynamic environments.
SCRAPIFY Research Internship. Ensemble vision algorithms for floating waste detection on surface water. Real-time dynamic waste-mapping and tracking for autonomous collection. GPS integration for waste location logging and route optimization. Deployed on Raspberry Pi with Docker containerization for edge computing.
PERFINT Software Internship. Automated robotic docking near CT table for non-invasive surgical procedures. Custom Python GUI for FusionTrack 500 camera calibration. Point cloud-based end-effector pose validation. Bed tilt correction module for accurate operation on uneven hospital surfaces. Verified forward and inverse kinematics accuracy.